医疗AI能否取代医生?孟庆虎院士详解手术机器人专科化与场景智能落地实践
来源:陆士新医学基金会2025-09-15 21:18:53

当前,人工智能正以前所未有的热度席卷医疗领域,许多人相信,看似无所不能的“通用大模型”将是智慧医疗的终极答案。然而,在9月北京举办“肿瘤治疗创新进展与药物研发新趋势论坛”上,南方科技大学电子与电气工程系系主任、加拿大工程院院士孟庆虎教授却基于其团队在医疗机器人与人工智能领域的长期实践,指出了另一种可能——真正能落地的智能,或许不在于模型的“大而全”,而在于对“场景”的深刻洞察与破解。
在这场由北京陆士新医学基金会主办,国家卫生健康委员会百姓健康频道(CHTV)与医学论坛网共同承办的论坛上,孟庆虎教授以“人工智能浪潮中的智慧医疗创新”为题,系统剖析了AI技术在医疗应用中面临的真实瓶颈,并提出了以“场景智能”为核心的务实发展路径。

孟庆虎教授
算力、算法与数据:
AI的“三重依赖”与“低维困境”
孟庆虎教授首先指出,当前人工智能的发展,高度依赖于算力、算法与数据三大要素的协同推进。然而,这种依赖也构筑了其能力的内在边界,使其在本质上成为一种“低维智能”。
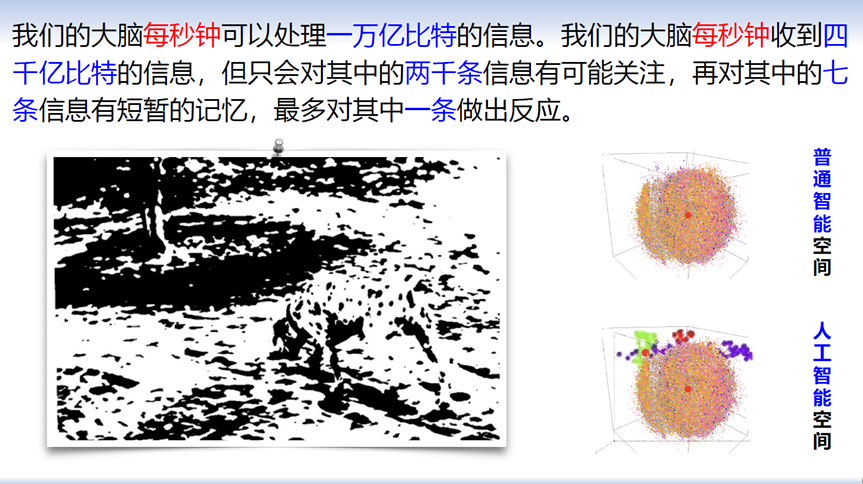
孟教授以人类智能作为参照:人脑能以极低的能耗(约20-30瓦),在一个近乎无限维度的“普通智能空间”里高效运作。这个空间由每个人独特、连续且多维度的生命体验数据训练而成,使其具备了强大的泛化、推理和创造性解决问题的能力。
相比之下,现有人工智能的能力建立在被精心筛选和有限数字化的数据集之上。“人工智能空间迄今为止还是一个维度不高的智能空间,”孟庆虎指出,“它在某些特定维度上(例如围棋)强度远超人类,但在更多维度上,其能力几乎为零。”他用一个生动的比喻揭示了其核心缺陷:“它学过的会,没学过的就不会”,深刻点明了当前AI缺乏本质理解与自主推理能力的现状。
图源:孟庆虎教授演讲幻灯
为了进一步阐释这种差异,孟庆虎举例说明,一张人眼可轻易解读为“右下角有四腿动物走向树荫”的复杂图像,无论是用传统的轮廓识别还是现代的点云分析方法,最先进的AI算法均无法正确解析。这证明其底层处理逻辑与人类的认知模式存在根本性不同。在算法机制与人类迥异、且训练数据仅为人类知识极小一部分的双重制约下,期望AI在需要高度推理和情境适应的复杂医疗场景中实现通用智能,目前仍不现实。
从“表演”到“干活”:
手术机器人的落地挑战与突破
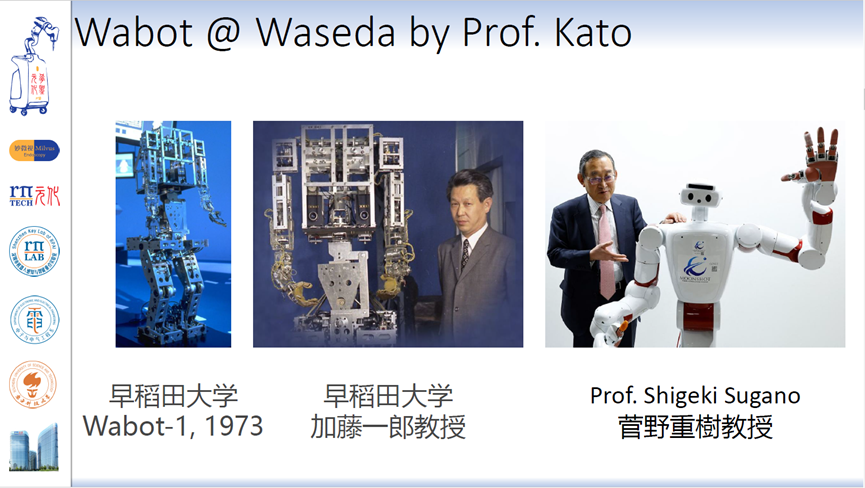
尽管仿生机器人领域曾被寄予厚望,但其发展路径却并非一帆风顺。孟庆虎教授回顾了从1973年日本早稻田大学加藤一郎教授研制出世界首个仿人机器人Wabot-1,到如今波士顿动力和特斯拉的“擎天柱”所展示的惊人运动能力。然而,他指出,这些进展多数仍停留在“演示”阶段,“有一个严重的问题就是落不了地”。他特别提到,当前国内部分研发存在重复投入现象,类似于“十年前的波士顿动力”,专注于动作炫技而非解决实际临床需求。
图源:孟庆虎教授演讲幻灯
这种“为演示而研发”的思维同样渗透至手术机器人领域。孟庆虎以直觉外科公司的达芬奇系统为例,指出其五代产品在二十年间的技术迭代“没有任何改变”,第五代仅增加了力传感功能,综合性能提升“不到40%”。更值得深思的是,许多国内跟随者陷入了“模仿却不超越”的困境——“他当年不加力传感,我们也不加;等他加了,大家一窝蜂上来加”。这种缺乏底层创新的模式,无疑制约了行业的技术进步。
针对这一瓶颈,孟庆虎教授团队所在的元化智能所采取了差异化路径.他们放弃了追逐通用型平台的执念,专注于“专科手术机器人”,转而深耕如骨科、泌尿外科等具体领域。其自主研发的骨科手术机器人在结构设计上完全区别于国际主流产品,实现了小型化与专机化,“仅两个篮球大小”。更重要的是,他们整合了创新的“光声成像术中软组织导航”技术,能够在手术中实时、精准地识别癌细胞边界,穿透深度达5厘米时精度可达0.1毫米。这项技术为解决癌症手术中“切得干净”与“保留更多健康组织”这一核心矛盾提供了革命性的工具,属于全球首创。
外科医生的未来:
会被仿人机器人取代吗?
关于"仿人机器人是否会替代外科医生"的问题,孟庆虎教授并未直接给出答案,而是分享了两位该领域权威学者的对立观点。
“手术机器人之父”、约翰斯·霍普金斯大学的Russell Taylor教授认为“不会”。他刚在《Science Robotics》上发表了全球首例全自主机器人胆囊切除术的研究。在他的理念中,手术机器人应是专用设备,与病人刚性连接并自主完成操作,“既然机器人能做手术,还要什么人?更不需要一个人形机器人来做机器人”。
而日本早稻田大学的人形机器人领域权威专家菅野重樹教授则持相反观点。他透露,日本国家级Moonshot计划中明确提出,旨在2050年前实现人形机器人在空间站等极端环境中执行手术任务。其逻辑在于:在深空探索中,无法携带整个医疗团队,一个能承担日常服务的人形机器人,在需要时通过下载软件和更换工具,即可变身为多专科手术专家,这是一种高效的解决方案。

图源:孟庆虎教授演讲幻灯
基于这些观点,孟庆虎教授进一步分析了仿人手术机器人可能带来的两种变革。一是“虚拟会诊”,即通过算法将多位顶尖专家的手术智能体(Agent)汇聚于云端,在真实医生不知情的情况下即可完成对复杂手术方案的协同论证;二是“众体合一”,即一个仿人机器人平台可以集成多个外科专科的顶级经验于一身,通过下载不同算法和更换工具,从“骨科专家”瞬间切换为“神经外科专家”。这预示着,未来的手术能力可能以“软件定义”的方式加载于通用的仿人机器人硬件平台之上。
场景智能:
迈向可落地AI医疗的务实路径
针对当前通用人工智能(AGI)的局限性,孟庆虎教授提出了"场景智能"的发展路径。他强调,"通用大模型只是一个极限值,永远不会真正到来",而真正可行的方案是将人工智能的能力聚焦于特定临床场景的需求。
孟庆虎教授以团队研发的"主动型无线胶囊机器人"为例,阐述了场景智能的应用价值。该设备虽然不具备通用AI的文字识别或人脸识别能力,但在消化道检查这一特定场景中表现出世界领先的专业水平。它能够在消化道内自主运动,识别所有异常病变,后续版本还可实现取样、切除和给药等功能。这种设计思路表明,通过将智能需求限定在明确场景内,无需超大算力即可实现可靠的临床应用。
图源:孟庆虎教授演讲幻灯
这一理念与人工智能领域的奠基性思考高度契合。孟庆虎教授引用了图灵1947年在伦敦数学学会的演讲观点:"我们想要的是一台能够从经验中学习的机器",强调机器应该像人类一样通过经验学习,而非仅仅被动接受数据喂养。同时,他提到了2025年图灵奖得主Rich Sutton的论断:"大模型已逼近人类数据边界。真正的智能应该像婴儿在感知行动中自我学习。"这些观点共同指出,未来人工智能的发展方向应是自主、渐进式的场景化学习,而非依赖现有数据的大规模喂养。
结语:
在理性与愿景之间
寻求智慧医疗的平衡点
孟庆虎教授的报告为人工智能在医疗领域的发展提供了清晰的框架。他指出,当前AI技术存在明显的"低维智能"局限,仿生机器人与手术机器人的发展仍需克服诸多技术瓶颈,而"场景智能"代表了一条更加务实的落地路径。
对未来发展,孟庆虎教授提出了明确建议:应积极学习和掌握AI工具,但需以场景智能替代通用模型;仿生机器人医生终将到来,但仍需要经历5-15年的技术攻坚与额外的5-10年成本控制过程;同时需要系统性地收集多模态临床数据,为智能系统提供高质量训练资源。
他特别强调,虽然人形机器人在远期可能成为集成多专科能力的手术平台,但现阶段更需要专注于解决具体临床问题的专科化解决方案。这种务实而前瞻的视角,为人工智能在医疗领域的发展提供了既避免过度炒作、又不失创新雄心的平衡点,为产学研各界的后续工作指明了方向。
来源:陆士新医学基金会
 CHTV 百姓健康微信
CHTV 百姓健康微信